CONCEVOIR
💡 Note importante
Cette section est un extrait de mon portfolio. Au début de cette page, vous trouverez mes premiers projets réalisés durant ma première année (BUT1). Mais plus vous descendez, plus vous découvrirez des projets plus récents et aboutis, issus de ma deuxième et troisième année (BUT2 & BUT3).
📌 En résumé : Plus vous explorez la page, plus les projets gagnent en qualité et en complexité !
BUT1
1.1 Ac11.01 : Produire une analyse fonctionnelle d’un système.
1.1.1 SAE 1.1 : Testeur de batterie
Avant de concevoir un prototype de testeur de batterie, le professeur nous a expliqué toute la base de l’électronique : les résistances, les diodes, les comparateurs et les potentiomètres. A partir d’un schéma, il nous a expliqué les positionnements et les liens entre eux des composants
J’ai noté les informations transcrites au tableau par l’enseignant mais elles n’étaient pas suffisamment détaillées pour comprendre complètement l’utilisation de chaque composant et leurs liens avec d’autres composants. Ces détails supplémentaires sont souvent dits à l’oral et je ne les ai pas notés donc je ne les mémorise pas. A l’avenir, j’ajouterai à mes notes, les informations dites uniquement à l’oral.
Je ne suis pas très à l’aise avec les calculs, en particulier avec les formules permettant de calculer l’impédance, etc.
Je n’ai pas vraiment eu de problème au niveau de la reconnaissance des symboles de chaque composant.
SAE 2.1 : Robot suiveur de ligne
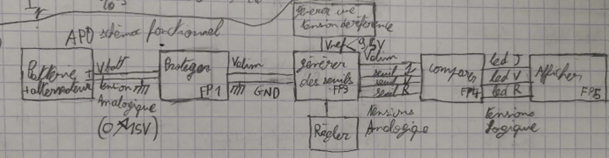
Le prof nous explique le schéma fonctionnel comme l’ancien projet testeur de batterie.
Grâce au projet précédent, j’ai pu déduire quelle était l’utilisation de certains composants et de techniques dans le montage, comme par exemple, le pont diviseur de tension. Ainsi, la compréhension du schéma a été plus simple pour moi.
Parfois, le professeur communique des informations à l’oral qui ne sont pas forcément à connaitre par cœur mais je les note quand même afin obtenir un maximum d’éléments pour des futurs projets.
De plus, lorsque le professeur nous a demandé quelle méthode d’amplification utiliser pour ce montage, j’ai pu avoir plusieurs idées d’amplificateur. Le seul problème que j’ai rencontré a été de différencier les AOP et de comprendre l’intérêt de chaque méthode de leur utilisation, comme par exemple, le rail to rail, l’ampli suiveur et l’ampli non inverseur. Par ailleurs, je ne connais pas par cœur les codes couleur pour les résistances.
Je n’ai pas particulièrement rencontré de problèmes avec les calculs, mais je n’étais pas à l’aise pour retenir plusieurs formules. Après avoir effectué les minitests, je prends toujours des notes sur les points dans lesquels je n’ai pas réussi, en utilisant la correction comme référence.
1.2 Ac11.02 : Réaliser un prototype pour des solutions techniques matérielles et/ou logicielles
1.2.1 SAE 1.1 : Testeur de batterie
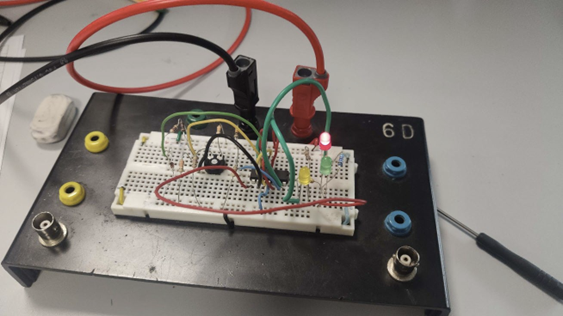
On a commencé à produire un prototype de testeur de batterie avec les composants disponibles dans la salle. Après avoir réussi le câblage et m’être assuré que cela fonctionnait, j’ai récupéré un circuit imprimé et j’ai utilisé le schéma du circuit imprimé pour positionner les bons composants aux endroits indiqués. Pour que le prototype soit conforme au cahier des charges, j’ai dû suivre les indications du schéma
Le problème que j’ai pu avoir lors de la reproduction du prototype est que j’ai d’avantage suivi le schéma plutôt qu’essayer de comprendre la théorie et la logique de relation des composants entre eux. Cela m’a gêné lors des contrôles. C’est pourquoi, pour le projet suivant, j’ai plus travaillé la théorie. J’ai quand même reproduit le schéma avec mon collègue, parce que c’est important pour le métier que j’aimerais pratiquer.
La création du prototype et du circuit imprimé ne m’a pas posé de difficultés particulières. Par ailleurs, j’ai pu maîtriser la soudure.
SAE 2.1 : Robot suiveur de ligne
Après avoir terminé la partie théorique, nous passons à la pratique pour la création d’un prototype. Dans cette étape, nous devons reproduire le schéma dans le logiciel Eagle en utilisant les bons composants avec les bonnes valeurs.
Une fois le schéma reproduit, nous devons le transformer en circuit imprimé, placer les composants aux bons endroits et les relier entre eux.
Ce qui a été difficile pour moi, c’est de placer les composants aux bons endroits. J’ai essayé différentes techniques pour simplifier cette étape, mais je n’ai pas encore trouvé la méthode optimale.
Quant à la soudure, je n’ai pas rencontré de problèmes particuliers, mais je ne la maîtrise pas comme un professionnel.
Ensuite, il était nécessaire de vérifier la qualité de la soudure en utilisant un ohmmètre et de tester le prototype.
Dans l’ensemble, nous n’avons pas rencontré de problèmes majeurs, et lorsque des problèmes se sont présentés, nous avons réussi à en identifier la cause.
Quand on teste le prototype et si on n’obtient pas le résultat attendu grâce aux nombreux essais du précédent projet, je sais à quel endroit prendre la mesure pour vérifier si la valeur de la tension ou de la fréquence correspond à la théorie et est logique.
J’ai pu réutiliser les informations acquises dans ce SAE dans ELEN et la compréhension de cette matière a été facilitée.
1.3 Ac11.03 : Rédiger un dossier de fabrication à partir d’un dossier de Conception
1.3.1 SAE 1.1 : Dé électronique
D’après le schéma, les 5 groupes qui participent au prototype de dé électronique sont les suivants
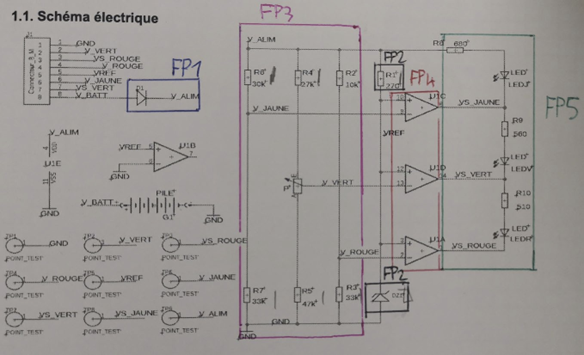
FP1 : permet de convertir en alimentation de référence FP2 : permet de générer une tension de référence
FP3 : permet de générer des seuils pour les LED
FP4 : comparateurs des seuils avec la tension de référence FP5 : permet d’allumer les 3 LED J’ai listé les composants utilisés pour réaliser ce prototype en donnant la référence, le nom du produit puis l’origine du composant et enfin le nombre de composants identiques. Je n’ai pas spécialement eu de difficultés.
SAE 2.1 : Robot suiveur de ligne
D’après le schéma on a :
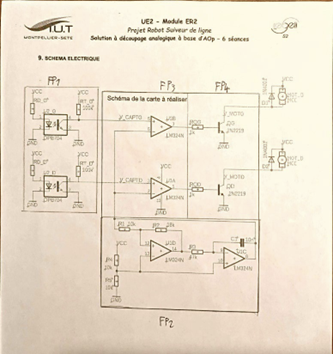
FP1 : Détecter la ligne
FP2 : Générer un signal triangulaire FP3 : Comparer
FP4 : Amplifier la Puissance
J’ai listé les composants utilisés pour réaliser ce prototype en donnant la référence, le nom du produit puis l’origine du composant et enfin le nombre de composants identiques. Je n’ai pas spécialement eu de difficultés.
BUT2
1.4 Ac21.01 : Proposer des solutions techniques liées à l’analyse fonctionnelle
1.4.1 PT Robot sumo
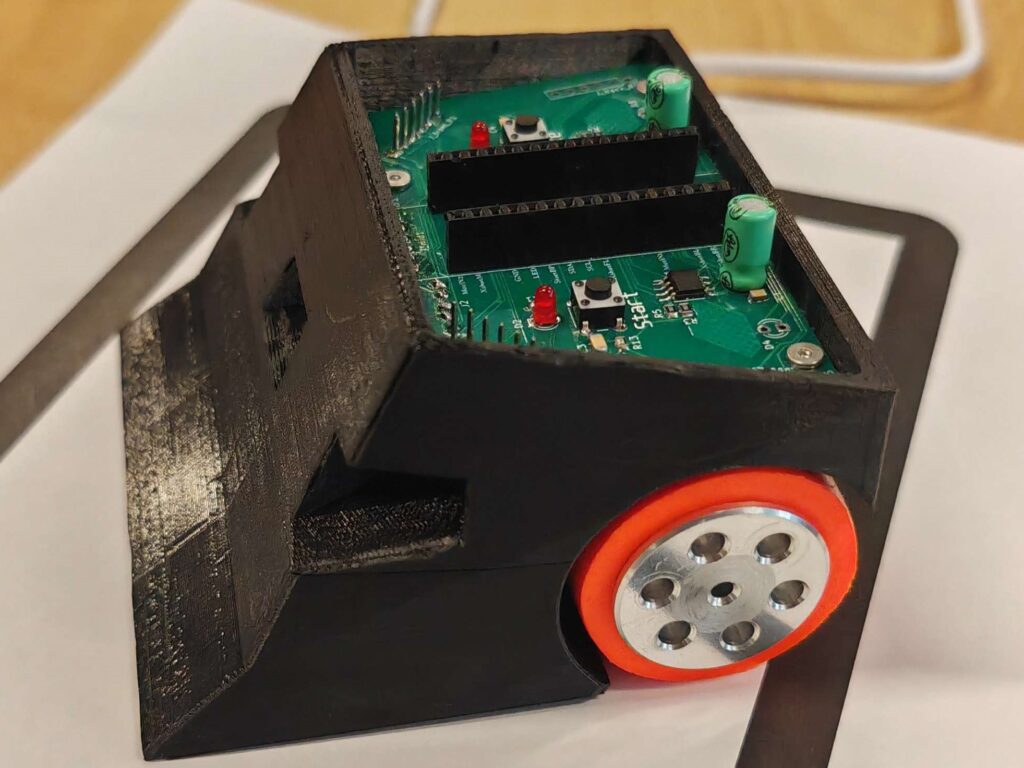
Dans le cadre de notre projet tutoré, nous étions une équipe de quatre personnes chargées de concevoir et de réaliser un robot sumo autonome et fonctionnel. Ce robot devait être capable de détecter l’adversaire, de le pousser hors du cercle, tout en s’assurant de ne pas franchir la ligne blanche.
Pour réaliser ce robot, nous devions créer un module de capteur de ligne et un module de capteur d’adversaire. Nous devions également concevoir un circuit imprimé (PCB) pour regrouper tous les composants nécessaires au fonctionnement du robot, tels que le driver de moteur, les boutons d’activation du robot, le microcontrôleur STM32, etc. Avant de réaliser le schéma fonctionnel, nous avons beaucoup discuté et effectué des recherches sur Internet pour déterminer quelle batterie, quelles roues, quel moteur utiliser. Nous avons pris en compte les règles du tournoi de robot sumo de Nîmes, comme la masse maximale ainsi que les dimensions maximales de longueur et de largeur, afin de choisir les composants appropriés. Voici le schéma obtenu :

Voici les fonctions obtenues :
FP1-FP2 : Alimenter et protéger contre les inversions de polarité
Utilisation d’un MOSFET canal P pour protéger contre l’inversion de polarité lors du branchement de la batterie
FP3 : Vérifier l’alimentation
Utilisation de deux LED pour indiquer l’état de l’alimentation en 3,3V et pour le débug du STM32.
FP4 : Contrôler
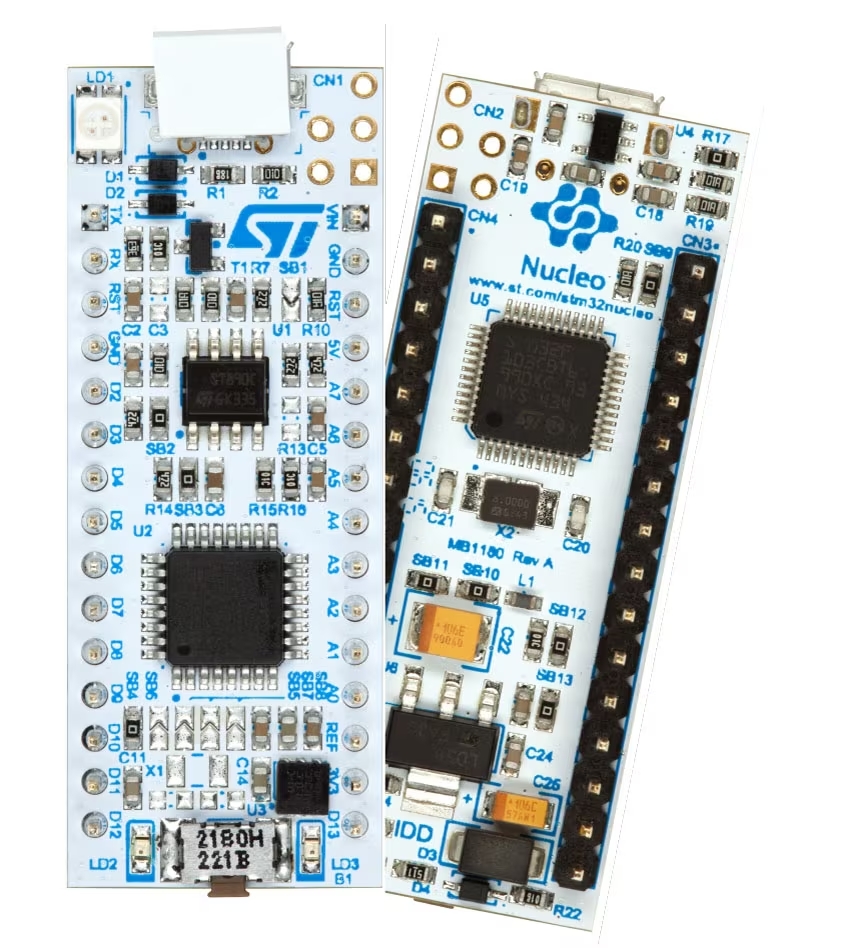
Utilisation de la carte Nucléo F303K8
FP5 : Démarrer le robot
Utilisation d’un bouton pour démarrer le robot.
FP6 : Changer de mode
Utilisation d’un bouton pour changer de mode
FP7 : Capter l’adversaire
Utilisation d’un PCB séparé avec le capteur TOF VL53L0X pour détecter l’adversaire.
FP8 : Capter la ligne
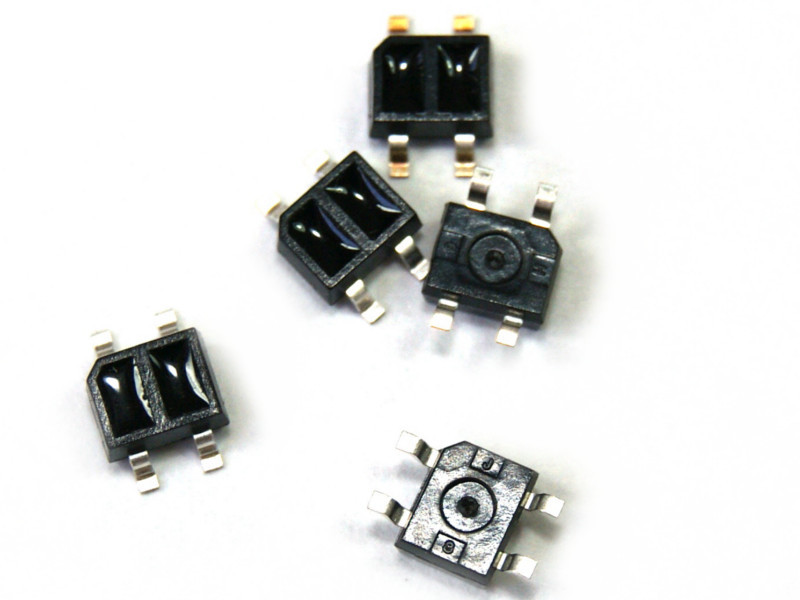
Utilisation d’un PCB séparé avec les capteurs QRE1113 pour détecter la ligne.
FP9 : Piloter les moteurs
Utilisation d’un driver de moteur pour piloter les moteurs
FP10 : Afficher le sens du moteur
Utilisation de 2 LED bidirectionnelles pour indiquer le sens de rotation des moteurs.
Nous avons réparti les tâches du projet entre les quatre membres de l’équipe afin d’optimiser notre travail. Chaque tâche a été assignée à la personne la plus à l’aise dans celle-ci.
J’ai commencé par créer le schéma et j’ai fait plusieurs suggestions avant de l’implémenter, comme l’utilisation d’un module de capteur de ligne en analogique plutôt qu’en numérique car cela permettrait d’utiliser moins de composants et d’obtenir des données plus précises. Ces valeurs pourraient ensuite être transformées en une variable « Mode ligne » dans le logiciel STM32.
À l’avenir, nous pourrions créer plusieurs modes pour améliorer la précision du robot.
J’ai passé beaucoup de temps à rechercher des empreintes compatibles sur KiCad. Les empreintes sont des composants prédéfinis dans KiCad avec leurs paramètres, tels que la taille du composant, le nom, le nombre de broches, les broches reliées à la masse, etc.
J’ai également consulté des datasheets pour obtenir des recommandations, notamment pour le driver moteur concernant les résistances et les capacités.
De plus, j’ai réutilisé des montages déjà vus en SAE3, comme le bouton antirebond.
En parallèle de la conception du schéma fonctionnel, j’ai commencé à apprendre à utiliser le logiciel Fusion 360 afin de créer plusieurs versions de robots sumo.
Pour la deuxième version du robot sumo, nous avons ajouté un buzzer pour jouer une petite musique, modifié le modèles 3D et optimisé le code du STM32.
Enfin, nous avons corrigé les erreurs rencontrées dans la première version.
Critique :
Dans le projet, nous avons appris à mieux nous organiser en équipe pour optimiser les tâches. J’étais vraiment motivé à concevoir, réfléchir et vérifier, car nous avions la liberté de créer et de modifier et chacun avait sa propre voie pour s’améliorer. Nous étions libres dans la création. En effet, en cours, nous devons réaliser des concepts déjà établis et effectuer des tâches moins intéressantes, ce qui peut nous démotiver.
Au début, il était un peu compliqué de trouver des idées pour la réalisation, car je n’avais pas les bases ni de point de départ en tête
Ce projet m’a permis d’identifier qu’il est important d’améliorer mes compétences en modélisation 3D avec le logiciel Fusion 360, car dans les futurs projets, nous devrons créer plusieurs objets pour adapter le PCB.
Lors de la réalisation de ce projet, nous n’avons utilisé que des bases déjà vues en SAE. Pour les futurs projets, il serait intéressant de trouver des éléments qui n’ont pas été abordés en SAE. Ainsi, nous pourrions élargir nos connaissances et apprendre davantage.
1.5 Ac21.02 : Dérisquer les solutions techniques retenues
1.5.1 PT Robot sumo
Après avoir finalisé le robot sumo, nous avons effectué des tests et avons appris des éléments importants.
Pour la fonction de protection contre l’inversion de polarité, on peut utiliser une diode. Cependant, une diode entraîne une chute de tension de 0,6 V. Avec un courant de 1 A, la perte de puissance est de 0,6 W, ce qui est problématique. Pour résoudre ce problème, il est préférable de remplacer la diode par un MOSFET canal P.
Nous avons modifié les valeurs des résistances du driver de moteur pour optimiser ses performances.
Pour le codage, des problèmes de projet peuvent survenir. Par exemple, deux projets peuvent avoir des codes similaires, dont un contient des codes supplémentaires pour d’autres fonctions. Même si ces projets partagent les mêmes paramètres, des erreurs peuvent se produire dans l’un et pas dans l’autre.
Pour chaque test, comme ceux des capteurs de ligne ou des capteurs adversaires, nous devions créer un nouveau projet dédié à une seule fonction. Si le test était concluant, nous publiions notre code sur un serveur privé Discord avec les collègues travaillant sur le même projet. Ensuite, nous devions créer un nouveau projet en regroupant tous les codes et en activant les paramètres nécessaires dans STM32 IDE.
J’ai rencontré de nombreux problèmes avec les projets. Par exemple, j’avais un projet qui récupérait les valeurs des capteurs de ligne. Une semaine plus tard, en reprenant exactement le même projet sans aucune modification, je n’arrivais plus à récupérer les valeurs des capteurs. J’ai alors créé un nouveau projet propre et j’ai rencontré les mêmes erreurs. Puis, en retournant au projet initial, j’ai finalement réussi à récupérer les valeurs. Je pense que le problème venait de mon microcontrôleur qui était défectueux, car désormais, lorsque j’exécute le programme, il met environ 10 secondes avant de récupérer les valeurs des capteurs de ligne.
Critique :
Je n’ai pas vraiment besoin d’améliorer le schéma fonctionnel, car nous avons effectué des recherches approfondies sur Internet et la conception reprend de nombreux concepts déjà vus en SAE. Je dois m’habituer à utiliser le logiciel STM32 et réduire les erreurs de programmation ainsi que les problèmes liés au logiciel. Bien que j’aie une bonne base, cela ne suffit pas.
BUT3
1.6 AC31.01 : Contribuer à la rédaction d’un cahier des charges
1.6.1 Capteur de la qualité de l’air connecté
Nous devons concevoir un système connecté destiné à mesurer la qualité de l’air. Ce système sera composé de trois modules :
-Un module capteur permettant la mesure de la température, de l’humidité et du taux de CO₂ dans l’air. Ce module enverra les informations recueillies vers un second module appelé « Bridge NRF ».
-Le module Bridge NRF, chargé de réceptionner ces données et de les transmettre au module suivant.
-Un troisième module « Base de données », destiné à centraliser et stocker toutes les informations reçues depuis le module Bridge NRF afin de faciliter leur analyse.
On commence par le premier module capteur, qui doit être conçu et fabriqué en intégrant un microcontrôleur STM32G030K8 directement soudé sur le PCB pour optimiser l’espace. Ce module intègre également un transceiver RF NRF24L01 ainsi qu’un module regroupant les deux capteurs ENS160 et AHT21. Pour assurer leur fonctionnement, les protocoles de communication I²C et SPI doivent être utilisés.
Le module capteur devra être alimenté par une simple pile, avec une autonomie supérieure à 6 mois lorsqu’il fonctionne en mode température, et d’au moins 1 mois en mode gaz.
Enfin, le module capteur doit être piloté à distance par la réception des données via le module NRF24L01.
Ensuite, concernant le module Bridge NRF, il sera réalisé à l’aide d’une carte Nucleo STM32F303RE, et les trames transmises devront être chiffrées.
Enfin, le module Base de données sera déployé sur un serveur Linux utilisant une base de données SQLite. Le développement logiciel devra être réalisé en C++ avec l’environnement Qt Creator.
La visualisation des données collectées se fera à travers un tableau de bord Grafana
Autocritique:
Je n’ai pas rencontré de difficultés particulières, car j’ai déjà utilisé les logiciels nécessaires à ce projet lors du semestre S4. Néanmoins, j’ai découvert le module NRF24L01 ainsi que la possibilité d’échanger des informations à l’aide de trames, ce qui s’avère particulièrement pratique pour les futurs projets.
1.6.2 Robot Labyrinthe
Création d’un robot autonome capable de résoudre un labyrinthe en suivant une ligne noire.
Dans la rédaction de notre cahier des charges, nous avons décidé de reprendre certains composants déjà utilisés dans notre précédent projet de robot sumo, afin de nous concentrer davantage sur la partie programmation.
Le robot sera constitué de deux cartes électroniques (PCB) :
PCB Capteur de ligne : destiné à détecter et suivre la ligne du labyrinthe. Cette carte sera équipée de cinq capteurs optiques QRE113, répartis comme suit :
- 2 capteurs pour assurer le suivi précis et stabiliser la trajectoire du robot,
- 1 capteur pour détecter la présence initiale de la ligne,
- 2 capteurs supplémentaires pour gérer la détection des intersections.
PCB Principal : contenant tous les composants essentiels au fonctionnement global du robot.
Cette carte inclura notamment :
- 1 microcontrôleur STM32F303K8,
- 2 driver moteur DRV8870DDA,
Ainsi que d’autres composants nécessaires à la gestion globale du système (non détaillés ici).
Ces deux PCB seront interconnectés par un câble dédié.
Concernant la partie logicielle, nous utiliserons un système d’exploitation temps réel (FreeRTOS), afin de gérer efficacement plusieurs tâches simultanément sur STM32F303K8.
Enfin, le système entier sera alimenté par une batterie LiPo 2S de 500 mAh, choisie pour garantir une autonomie suffisante lors des tests, tout en conservant une taille compacte et un poids réduit.
Autocritique :
Au final, j’ai repris le même projet que l’année dernière (le robot sumo). Le vrai travail était surtout la programmation. Le fait de retravailler à partir du cahier des charges précédent pour l’adapter n’a pas été difficile pour moi. J’aurais cependant pu chercher à aller plus loin dans les composants plutôt que de rester sur une base déjà connue.
1.7 AC31.02 : Prouver la pertinence de ses choix technologiques
1.7.1 Capteur de la qualité de l’air connecté
-Choix du microcontrôleur STM32G030K8 :
Nous avons sélectionné le STM32G030K8 principalement pour sa faible consommation énergétique et son format compact, parfaitement adaptés aux contraintes d’espace et d’autonomie du projet. Ses performances sont suffisantes pour gérer efficacement la communication avec les différents capteurs et modules RF, tout en assurant une autonomie supérieure à 6 mois en mode température, et d’environ 1 mois en mode gaz.
-Utilisation du module RF NRF24L01 :
Ce module RF a été retenu pour sa fiabilité, sa faible consommation électrique et sa facilité d’intégration grâce à l’existence de nombreuses bibliothèques disponibles en langage C.
-Capteurs ENS160 et AHT21 :
Ces deux capteurs ont été sélectionnés afin d’obtenir des données précises sur la qualité de l’air, notamment la température, l’humidité et la concentration en CO₂.
-Choix de SQLite pour la base de données :
SQLite constitue une solution légère et performante qui ne nécessite pas de serveur dédié, simplifiant ainsi la centralisation, le stockage et l’analyse des données recueillies.
1.7.2 Robot Labyrinthe
Nous avons choisi d’utiliser les capteurs QRE113 car ils sont spécialement adaptés à la détection d’une ligne noire sur un fond blanc. De plus, comme nous les avons déjà employés l’année dernière, leur réutilisation est avantageuse pour nous. Ce choix est d’autant plus pertinent que ces capteurs répondent parfaitement aux besoins de notre projet.
Concernant le microcontrôleur STM32F303K8, il dispose des ressources nécessaires pour implémenter FreeRTOS dans le cadre de notre projet. Il possède également un nombre suffisant de broches (pins) correspondant à nos besoins spécifiques. De plus, comme nous avons déjà en notre possession ce microcontrôleur, il n’est pas intéressant d’en acheter un autre modèle.
Enfin, nous utilisons le driver moteur DRV8870DDA car nous avons choisi de petits moteurs à courant continu (Gearmotor CC) de 460 RPM, parfaitement adaptés au faible poids de notre robot. Notre priorité n’est pas centrée sur la puissance ou la vitesse élevée, mais plutôt sur le développement logiciel poussé, la stabilité du robot et l’optimisation d’un algorithme.
Autocritique :
Nous n’avons pas beaucoup changé de composants par rapport au projet précédent, car nous voulions nous focaliser sur la partie logicielle et nous connaissions déjà bien ces composants.
Pour consulter la conclusion de toutes les compétences, cliquez sur le bouton ci-dessous, puis faites défiler la page jusqu’en bas.